
Uhamisho wa mwongozo - sanduku la gia la roboti
yaliyomo
Gari yoyote ya kisasa haitaweza kuanza na kusonga vizuri ikiwa hakuna maambukizi katika kifaa chake. Leo, kuna anuwai ya aina zote za sanduku za gia, ambazo haziruhusu tu dereva kuchagua chaguo linalofaa uwezo wake wa vifaa, lakini pia inafanya uwezekano wa kupata faraja ya juu kutoka kwa kuendesha gari.
Kwa kifupi juu ya aina kuu za maambukizi inaelezewa katika hakiki tofauti... Sasa wacha tuzungumze kwa undani zaidi juu ya nini sanduku la gia la roboti ni, tofauti zake kuu kutoka kwa sanduku la gia la mwongozo, na pia fikiria kanuni ya utendaji wa kitengo hiki.
Sanduku la gia la roboti ni nini
Uendeshaji wa sanduku la gia karibu ni sawa na analog ya mitambo isipokuwa huduma zingine. Kifaa cha roboti kinajumuisha sehemu nyingi ambazo hufanya toleo la kiufundi la sanduku ambalo tayari linajulikana kwa kila mtu. Tofauti kuu kati ya moja ya roboti ni kwamba udhibiti wake ni wa aina ya microprocessor. Katika sanduku kama hizo, kuhama kwa gia hufanywa na vifaa vya elektroniki kulingana na data kutoka kwa sensorer za injini, kanyagio la gesi na magurudumu.

Sanduku la roboti pia linaweza kuitwa mashine moja kwa moja, lakini hii ni jina lisilo sahihi. Ukweli ni kwamba maambukizi ya moja kwa moja hutumiwa kama dhana ya jumla. Kwa hivyo, tofauti hiyo hiyo ina hali ya kiotomatiki ya kubadilisha uwiano wa gia, kwa hivyo kwa wengine pia ni moja kwa moja. Kwa kweli, kwa suala la muundo na kanuni ya operesheni, roboti iko karibu na sanduku la mitambo.
Kwa nje, haiwezekani kutofautisha kati ya usafirishaji otomatiki na usafirishaji wa mwongozo, kwa sababu wanaweza kuwa na kiteuzi sawa na mwili. Unaweza kuangalia maambukizi tu wakati gari inaendesha. Kila aina ya kitengo ina sifa zake za kazi.
Kusudi kuu la usafirishaji wa roboti ni kufanya kuendesha gari iwe rahisi iwezekanavyo. Dereva haitaji kubadili gia peke yake - kazi hii inafanywa na kitengo cha kudhibiti. Mbali na faraja, watengenezaji wa usafirishaji wa moja kwa moja wanajitahidi kufanya bidhaa zao kuwa nafuu. Leo, robot ni aina ya bajeti zaidi ya sanduku la gia baada ya fundi, lakini haitoi raha kama hiyo ya kuendesha gari kama variator au otomatiki.
Kanuni ya sanduku la gia la roboti
Uambukizi wa roboti unaweza kubadili kasi inayofuata ama kiatomati au nusu moja kwa moja. Katika kesi ya kwanza, kitengo cha microprocessor kinapokea ishara kutoka kwa sensorer, kwa msingi wa ambayo algorithm iliyowekwa na mtengenezaji inasababishwa.
Sanduku nyingi za gia zina vifaa vya kuchagua mwongozo. Katika kesi hii, kasi bado itawaka kiatomati. Jambo pekee ni kwamba dereva anaweza kuashiria kwa uhuru wakati wa kuwasha gia ya juu au chini. Usafirishaji wa moja kwa moja wa aina ya Tiptronic una kanuni kama hiyo.
Ili kuongeza au kupunguza kasi, dereva husogeza lever ya kuchagua kuelekea + au kuelekea -. Shukrani kwa chaguo hili, watu wengine huita ufuatiliaji huu mfululizo au mfuatano.
Sanduku la roboti hufanya kazi kulingana na mpango ufuatao:
- Dereva anapiga breki, anaanza injini na kusonga swichi ya hali ya kuendesha hadi nafasi D;
- Ishara kutoka kwa kitengo huenda kwenye kitengo cha kudhibiti sanduku;
- Kulingana na hali iliyochaguliwa, kitengo cha kudhibiti huwasha algorithm inayofaa kulingana na ambayo kitengo kitatumika;
- Katika mchakato wa harakati, sensorer hutuma ishara kwa "ubongo wa roboti" juu ya kasi ya gari, juu ya mzigo wa kitengo cha nguvu, na pia juu ya hali ya sasa ya sanduku la gia;
- Mara tu viashiria vinapokoma kuendana na programu iliyosanikishwa kutoka kwa kiwanda, kitengo cha kudhibiti kinatoa amri ya kubadilika kuwa gia nyingine. Hii inaweza kuwa kuongezeka au kupungua kwa kasi.
Wakati dereva anaendesha gari na ufundi, lazima ahisi gari lake ili kubaini wakati wa kubadili kasi nyingine. Katika analog ya roboti, mchakato kama huo unafanyika, dereva tu haitaji kufikiria juu ya wakati wa kuhamisha lever ya kuhama kwenda kwenye nafasi inayotakiwa. Badala yake, microprocessor hufanya hivyo.
Mfumo hufuatilia habari zote kutoka kwa sensorer zote na huchagua gia mojawapo kwa mzigo maalum. Ili umeme uweze kubadilisha gia, usafirishaji una actuator ya hydromechanical. Katika toleo la kawaida zaidi, badala ya hydromechanics, gari la umeme au servo drive imewekwa, ambayo inaunganisha / kukataza clutch kwenye sanduku (kwa njia, hii ina kufanana na sanduku la gia moja kwa moja - clutch haipo mahali penye upitishaji wa mwongozo, ambayo ni karibu na flywheel, lakini katika kesi yenyewe uambukizaji).
Wakati kitengo cha kudhibiti kinatoa ishara kuwa ni wakati wa kubadili kasi nyingine, gari la kwanza la umeme (au hydromechanical) servo inaamilishwa kwanza. Inatenganisha nyuso za msuguano wa clutch. Servo ya pili kisha inahamisha gia kwenye utaratibu kwa nafasi inayotakiwa. Kisha ya kwanza polepole hutoa clutch. Ubunifu huu unaruhusu utaratibu wa kufanya kazi bila ushiriki wa dereva, kwa hivyo, mashine iliyo na maambukizi ya roboti haina kanyagio wa kushikilia.

Sanduku nyingi za kuchagua zimelazimisha nafasi za gia. Hii inayoitwa tiptronic inaruhusu dereva kudhibiti kwa uhuru wakati wa kubadili kasi ya juu au chini.
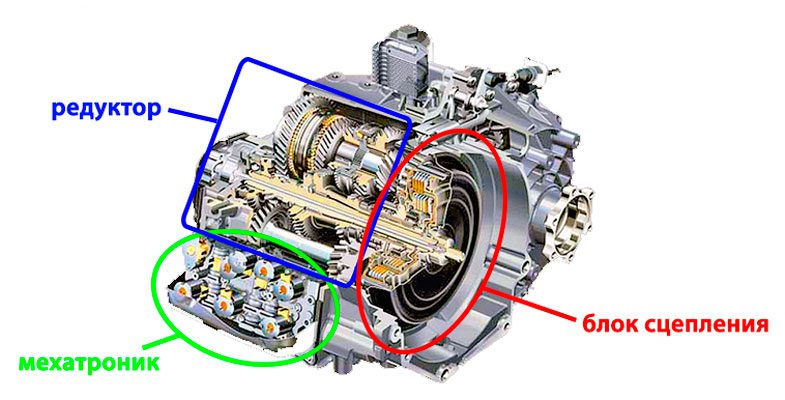
Kifaa cha sanduku la gia ya Robotic
Leo, kuna aina kadhaa za usafirishaji wa roboti kwa magari ya abiria. Wanaweza kutofautiana kati yao kwa watendaji wengine, lakini sehemu kuu hubaki sawa.
Hapa kuna nodi zilizojumuishwa kwenye sanduku la gia:
- Clutch. Kulingana na mtengenezaji na muundo wa kitengo, hii inaweza kuwa sehemu moja na uso wa msuguano au rekodi kadhaa zinazofanana. Mara nyingi, vitu hivi viko kwenye baridi, ambayo huimarisha utendaji wa kitengo, kuizuia kutokana na joto kali. Chaguo la kuchagua au chaguzi mbili inachukuliwa kuwa bora zaidi. Katika muundo huu, wakati gia moja inashiriki, seti ya pili inajiandaa kuwasha kasi inayofuata.
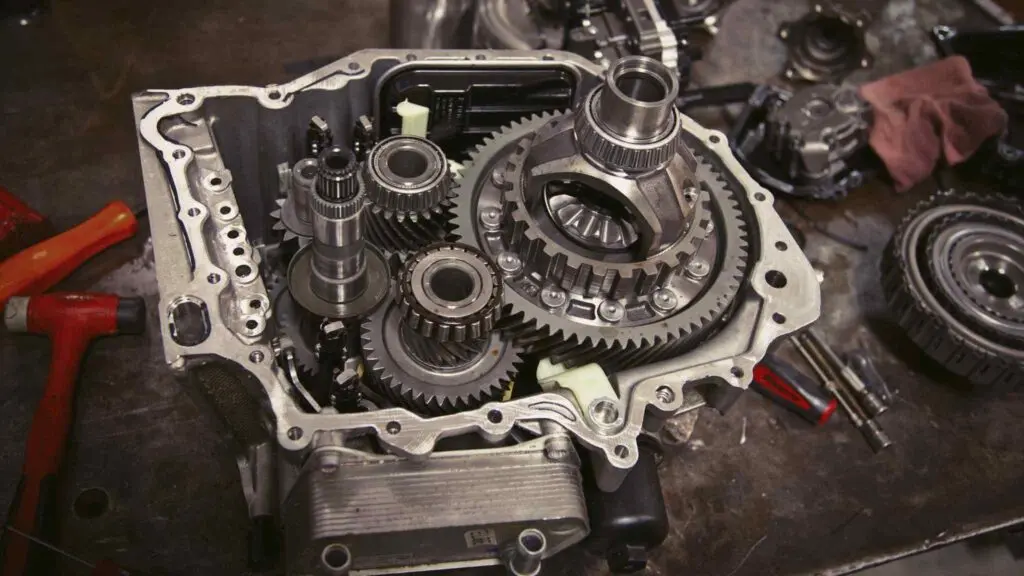
- Sehemu kuu ni sanduku la kawaida la mitambo. Kila mtengenezaji hutumia miundo tofauti ya wamiliki. Kwa mfano, roboti kutoka kwa chapa ya Mercedes (Speedshift) ndani ni usafirishaji wa moja kwa moja wa 7G-Tronic. Tofauti pekee kati ya vitengo ni kwamba badala ya kibadilishaji cha torque, clutch iliyo na rekodi kadhaa za msuguano hutumiwa. BMW ina njia sawa. Sanduku lake la gia la SMG linategemea sanduku la mwongozo lenye mwendo wa kasi sita.
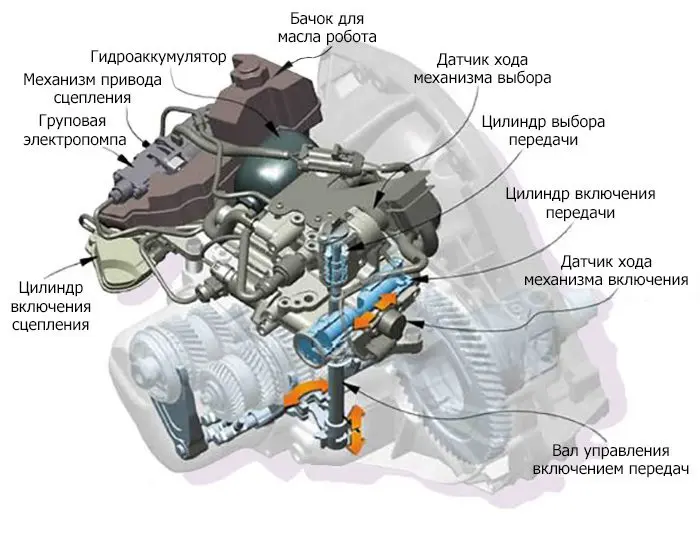
- Clutch na gari la usafirishaji. Kuna chaguzi mbili - na gari la umeme au analog ya hydromechanical. Katika kesi ya kwanza, clutch ni mamacita nje na motor umeme, na katika pili - na mitungi ya majimaji na valves EM. Hifadhi ya umeme inafanya kazi polepole kuliko majimaji, lakini haiitaji utunzaji wa shinikizo la kila wakati kwenye laini, ambayo aina ya umeme-majimaji inafanya kazi. Roboti ya majimaji huenda kwa hatua inayofuata haraka zaidi (sekunde 0,05 dhidi ya sekunde 0,5 kwa analog ya umeme). Sanduku la gia la umeme limewekwa hasa kwenye magari ya bajeti, na sanduku la gia ya hydromechanical imewekwa kwenye magari ya michezo ya kiwango cha juu, kwani kasi ya gia ni muhimu sana ndani yao bila kukatisha usambazaji wa umeme kwa shimoni la kuendesha.

- Sensorer. Kuna sehemu nyingi kwenye roboti. Wao hufuatilia vigezo vingi vya usafirishaji, kwa mfano, nafasi ya uma, mapinduzi ya pembejeo na pembejeo za pato, katika hali ambayo swichi ya kichagua imefungwa, joto la baridi, nk. Habari hii yote inalishwa kwa kifaa cha kudhibiti vifaa.
- ECU ni kitengo cha microprocessor, ambamo algorithms tofauti zimepangwa na viashiria tofauti kutoka kwa sensorer. Kitengo hiki kimeunganishwa na kitengo kuu cha kudhibiti (kutoka hapo data juu ya operesheni ya injini inakuja), na pia mifumo ya umeme ya kufunga magurudumu (ABS au ESP).
- Actuators - mitungi ya majimaji au motors za umeme, kulingana na muundo wa sanduku.
Maelezo ya kazi ya RKPP
Ili gari lianze vizuri, dereva lazima atumie kanyagio la clutch kwa usahihi. Baada ya kuingiza gia la kwanza au la kurudisha nyuma, anahitaji kutolewa vizuri. Mara tu dereva anapohisi ushiriki wa diski, anapotoa kanyagio, anaweza kuongeza revs kwenye injini ili gari lisisimame. Hivi ndivyo mitambo inavyofanya kazi.
Mchakato sawa unafanyika kwa mwenzake wa roboti. Tu katika kesi hii ustadi mkubwa hauhitajiki kutoka kwa dereva. Anahitaji tu kusogeza swichi ya sanduku kwenda kwenye nafasi inayofaa. Gari itaanza kusonga kulingana na mipangilio ya kitengo cha kudhibiti.

Marekebisho rahisi zaidi ya clutch moja hufanya kazi kama mitambo ya kawaida. Walakini, wakati huo huo, kuna shida moja - umeme haurekodi maoni ya clutch. Ikiwa mtu anaweza kuamua jinsi inavyostahili kutolewa kwa kanyagio katika hali fulani, basi kiotomatiki hufanya kazi kwa bidii zaidi, kwa hivyo harakati ya gari inaambatana na jerks zinazoonekana.
Hii inahisiwa sana katika marekebisho na gari la umeme la watendaji - wakati gia inabadilika, clutch itakuwa katika hali wazi. Hii itamaanisha mapumziko ya mtiririko wa torque, kwa sababu ambayo gari huanza kupungua. Kwa kuwa kasi ya kuzunguka kwa magurudumu tayari iko chini sawa na gia inayohusika, jerk kidogo hufanyika.
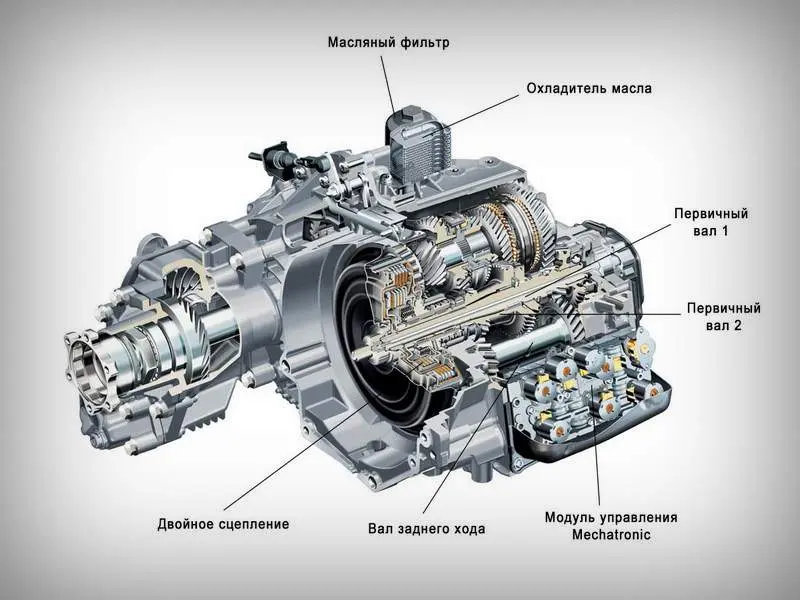
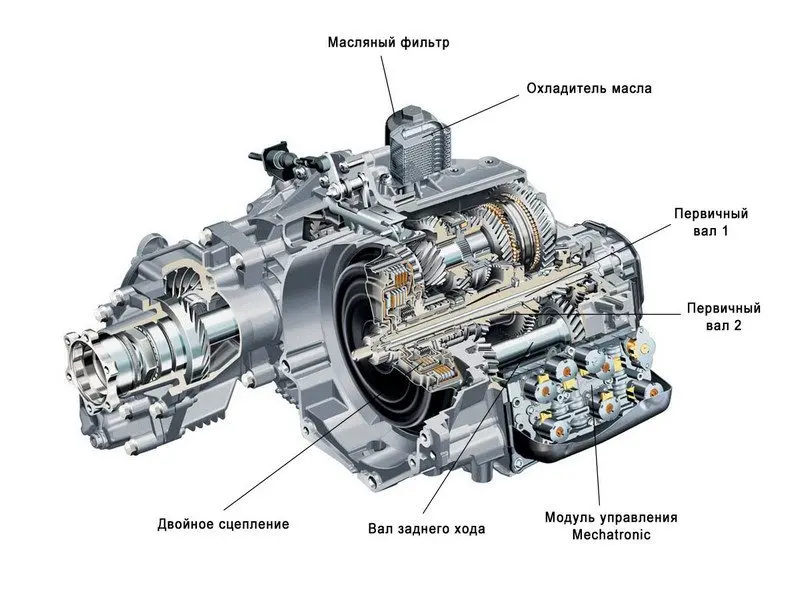
Suluhisho la ubunifu wa shida hii ilikuwa maendeleo ya muundo wa clutch mbili. Mwakilishi wa kushangaza wa usafirishaji kama huo ni Volkswagen DSG. Wacha tuangalie kwa undani huduma zake.
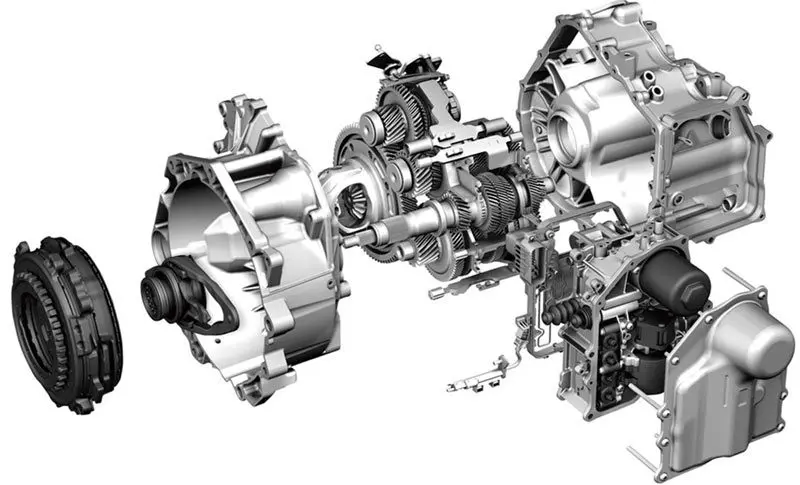
Makala ya sanduku la gia la roboti la DSG
Kifupisho kinasimama kwa sanduku la gia la kuhama moja kwa moja. Kwa kweli, hizi ni masanduku mawili ya kiwanda yaliyowekwa kwenye nyumba moja, lakini ikiwa na kiunganisho kimoja kwenye chasisi ya mashine. Kila utaratibu una clutch yake mwenyewe.
Kipengele kuu cha muundo huu ni hali ya kuchagua. Hiyo ni, wakati shimoni la kwanza linaendesha na gia inayohusika, vifaa vya elektroniki tayari vinaunganisha gia zinazofanana (wakati wa kuongeza kasi ya kuongeza gia, wakati unapungua hadi chini) ya shimoni la pili. Mchezaji mkuu anahitaji tu kukataza clutch moja na kuunganisha nyingine. Mara tu ishara inapopokelewa kutoka kwa kitengo cha kudhibiti ili kubadili hatua nyingine, clutch inayofanya kazi inafungua, na ile ya pili iliyo na gia tayari imeunganishwa mara moja.
Ubunifu huu hukuruhusu kupanda bila jerks kali wakati wa kuharakisha. Maendeleo ya kwanza ya muundo wa kuchagua ulionekana katika miaka ya 80 ya karne iliyopita. Ukweli, basi roboti zilizo na clutch mbili ziliwekwa kwenye mkutano na magari ya mbio ambayo kasi na usahihi wa kuhama kwa gia ni muhimu sana.
Ikiwa tunalinganisha sanduku la DSG na otomatiki ya kawaida, basi chaguo la kwanza lina faida zaidi. Kwanza, kwa sababu ya muundo wa kawaida wa vitu kuu (mtengenezaji anaweza kuchukua mfano wowote wa mitambo kama msingi), sanduku kama hilo litakuwa rahisi kuuza. Sababu hiyo hiyo inaathiri matengenezo ya kitengo - mitambo ni ya kuaminika zaidi na rahisi kutengeneza.
Hii ilimwezesha mtengenezaji kusakinisha usambazaji wa ubunifu kwenye mifano ya bajeti ya bidhaa zao. Pili, wamiliki wengi wa gari zilizo na sanduku kama hilo wanaona kuongezeka kwa uchumi wa gari ikilinganishwa na mfano unaofanana, lakini na sanduku la gia tofauti.
Wahandisi wa wasiwasi wa VAG wameunda anuwai mbili za usafirishaji wa DSG. Mmoja wao ameandikwa 6, na nyingine ni 7, ambayo inalingana na idadi ya hatua kwenye sanduku. Pia, moja kwa moja ya kasi sita hutumia kishikizi cha mvua, na analog ya kasi saba hutumia clutch kavu. Kwa habari zaidi juu ya faida na hasara za sanduku la DSG, na vile vile mtindo mwingine wa DSG 6 unatofautiana na mabadiliko ya saba, angalia makala tofauti.
Faida na hasara
Aina inayozingatiwa ya usafirishaji ina pande nzuri na hasi. Faida za sanduku ni pamoja na:
- Uhamisho kama huo unaweza kutumika sanjari na kitengo cha nguvu cha karibu nguvu yoyote;
- Ikilinganishwa na variator na mashine moja kwa moja, toleo la roboti ni la bei rahisi, ingawa hii ni maendeleo ya ubunifu;
- Roboti ni za kuaminika zaidi kuliko maambukizi mengine ya moja kwa moja;
- Kwa sababu ya kufanana kwa ndani na fundi, ni rahisi kupata mtaalamu ambaye atachukua ukarabati wa kitengo;
- Kuhama kwa gia bora kunaruhusu utumiaji wa nguvu ya injini bila ongezeko kubwa la matumizi ya mafuta;
- Kwa kuboresha ufanisi, mashine hutoa vitu visivyo na madhara katika mazingira.
Licha ya faida zilizo wazi juu ya usafirishaji mwingine wa moja kwa moja, roboti ina hasara kadhaa kubwa:
- Ikiwa gari ina vifaa vya diski moja, basi safari kwenye gari kama hiyo haiwezi kuitwa vizuri. Wakati wa kubadilisha gia, kutakuwa na jerks zinazoonekana, kana kwamba dereva ghafla anatupa kanyagio ya clutch kwenye fundi.
- Mara nyingi, clutch (laini laini ya ushiriki) na watendaji hushindwa kwenye kitengo. Hii inachanganya ukarabati wa usafirishaji, kwani wana rasilimali ndogo ya kufanya kazi (kama kilomita elfu 100). Servos haziwezi kutengenezwa na mifumo mpya ni ghali.
- Kama kwa clutch, rasilimali ya disc pia ni ndogo sana - kama elfu 60. Kwa kuongezea, karibu nusu ya rasilimali ni muhimu kutekeleza "unganisho" la sanduku chini ya hali ya uso wa msuguano wa sehemu hizo.
- Ikiwa tutazungumza juu ya muundo wa mapema wa DSG, basi imeonekana kuwa ya kuaminika zaidi kwa sababu ya wakati mdogo wa kubadili gia (kwa sababu ya hii, gari haipunguzi sana). Licha ya haya, mshikamano bado unateseka ndani yao.
Kwa kuzingatia sababu zilizoorodheshwa, tunaweza kuhitimisha kuwa kwa kadiri ya kuaminika na maisha ya kazi, fundi bado hawana sawa. Ikiwa msisitizo umewekwa kwenye faraja ya juu, basi ni bora kuchagua anuwai (ni nini upekee wake, soma hapa). Ikumbukwe kwamba usafirishaji kama huo hautatoa fursa ya kuokoa mafuta.
Kwa kumalizia, tunatoa ulinganisho mfupi wa video ya aina kuu za usambazaji - faida na hasara zao:

Maswali na Majibu:
Kuna tofauti gani kati ya roboti na automaton? Maambukizi ya kiotomatiki hufanya kazi kwa gharama ya kibadilishaji cha torque (hakuna uunganisho mgumu na flywheel kupitia clutch), na roboti ni sawa na mechanics, kasi tu hubadilishwa kiatomati.
Jinsi ya kubadilisha gia kwenye sanduku la roboti? Kanuni ya kuendesha roboti ni sawa na kuendesha mashine moja kwa moja: hali inayotaka inachaguliwa kwenye kichaguzi, na kasi ya injini inadhibitiwa na kanyagio cha gesi. Kasi itabadilika yenyewe.
Je! Kuna miguu ngapi kwenye gari iliyo na roboti? Ingawa roboti kimuundo inafanana na fundi, clutch hutenganishwa kiotomatiki na gurudumu la kuruka, kwa hivyo gari iliyo na upitishaji wa roboti ina kanyagio mbili (gesi na breki).
Jinsi ya kuegesha gari vizuri na sanduku la roboti? Mtindo wa Ulaya lazima uegeshwe katika hali ya A au katika gia ya nyuma. Ikiwa gari ni Amerika, basi kuna hali ya P kwenye kichaguzi.
Maoni moja
Daudi
Hello, ninahitaji msaada, coupes 203 ziliingia katika hali ya dharura, naweza kufanya nini?